circles = cv2.HoughCircles(img,
cv2.HOUGH_GRADIENT, 1, 20,
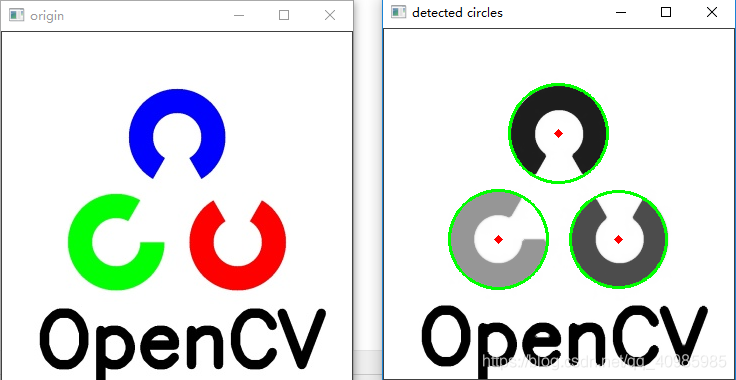
param1=50, param2=40, minRadius=25, maxRadius=0)
img: 待检测的灰度图cv2.HOUGH_GRADIENT:检测的方法,霍夫梯度1:检测的圆与原始图像具有相同的大小,dp=2,检测的圆是原始图像的一半20:检测到的相邻圆的中心的最小距离(如果参数太小,除了一个真实的圆外,还可能会错误地检测到多个相邻圆。如果太大,可能会漏掉一些圆。)param1:在#HOUGHŠu梯度的情况下,它是较高的. 两个阈值传递到Canny边缘检测器(较低的一个小两倍)。param2:在#HOUGHŠu梯度的情况下,它是检测阶段圆心的累加器阈值。它越小,就越可能检测到假圆;minRadius:最小圆半径maxRadius:最大圆半径,如果=0,则使用最大图像尺寸。如果0,则返回没有找到半径的中心。
# 霍夫圆检测
import cv2
import numpy as np
cimg = cv2.imread('opencv_logo_350.jpg')
cv2.imshow("origin", cimg)
cv2.waitKey(0)
img = cv2.cvtColor(cimg,cv2.COLOR_BGR2GRAY)
img = cv2.medianBlur(img, 5)
cimg = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)
# - img: 待检测的灰度图
# - cv2.HOUGH_GRADIENT:检测的方法,霍夫梯度
# - 1:检测的圆与原始图像具有相同的大小,dp=2,检测的圆是原始图像的一半
# - 20:检测到的圆的中心的最小距离(如果参数为太小,除了一个真实的圆外,还可能会错误地检测到多个相邻圆。如果太大,可能会漏掉一些圆。)
# - param1:在#HOUGHŠu梯度的情况下,它是较高的. 两个阈值传递到Canny边缘检测器(较低的一个小两倍)。
# - param2:在#HOUGHŠu梯度的情况下,它是检测阶段圆心的累加器阈值。它越小,就越可能检测到假圆;
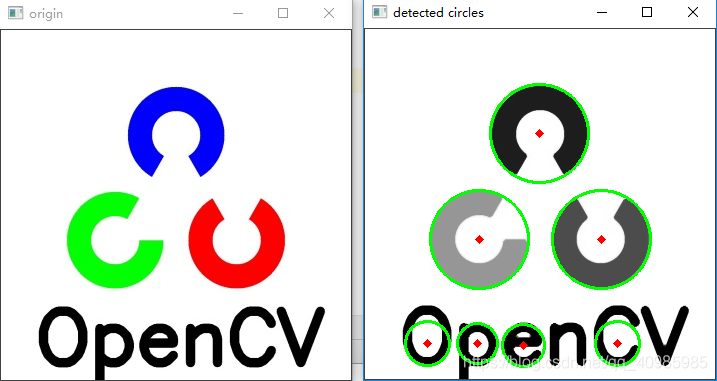
# - minRadius:最小圆半径,也可能会检测到假圆
# - maxRadius:最大圆半径,如果=0,则使用最大图像尺寸。如果0,则返回没有找到半径的中心。
circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
param1=50, param2=40, minRadius=0, maxRadius=0)
# 最小圆半径设置不合适,也可能会检测到假圆
# circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
# param1=50, param2=40, minRadius=0, maxRadius=0)
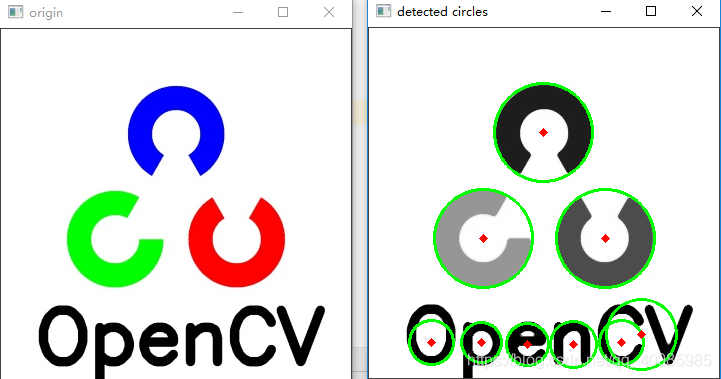
# circles = cv2.HoughCircles(img, cv2.HOUGH_GRADIENT, 1, 20,
# param1=50, param2=30, minRadius=10, maxRadius=0)
circles = np.uint16(np.around(circles))
print(len(circles))
print(circles)
for i in circles[0, :]:
# 绘制外圈圆(蓝色)
cv2.circle(cimg, (i[0], i[1]), i[2], (0, 255, 0), 2)
# 绘制圆心(红色)
cv2.circle(cimg, (i[0], i[1]), 2, (0, 0, 255), 3)
cv2.imshow('detected circles', cimg)
cv2.waitKey(0)
cv2.destroyAllWindows()
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_houghcircles/py_houghcircles.html#hough-circles
到此这篇关于OpenCV霍夫圆变换cv2.HoughCircles()的文章就介绍到这了,更多相关OpenCV霍夫圆变换内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!


 咨 询 客 服
咨 询 客 服