
雷锋网(公众号:雷锋网)新智驾按:谷歌是自动驾驶研究领域的“老大哥”,能被冠以这样的名号,一定是有足够的实力来做支撑。过去的“谷歌无人车”,现在的“Waymo”,十数年历程,一步步走来,除了那些被媒体广泛报道的明面信息,还有什么让 Waymo 的自动驾驶走在全球领先的位置。外媒《大西洋月刊》今日颁发长文:《Inside Waymo's Secret World for Training Self-Driving Cars》,解密了 Waymo 自动驾驶的两大重磅兵器:自动驾驶模拟系统 Carcraft 以及测试基地 Castle。让我们跟随作者 Alexis C. Madrigal 的脚步,去了解Carcraft,探营Castle,一步步揭晓全球最先进自动驾驶的成长秘辛。雷锋网新智驾进行了全文编译,希望能为国内自动驾驶从业者提供一些借鉴。
在谷歌母公司 Alphabet 的园区里,有一支团队正在从事着有可能成为自动驾驶汽车关键的软件技术的研究,,至今没有记者见过他们是如何工作的。他们将软件系统取名为“Carcraft”,取义自著名的网络游戏World of Warcraft(魔兽世界)。
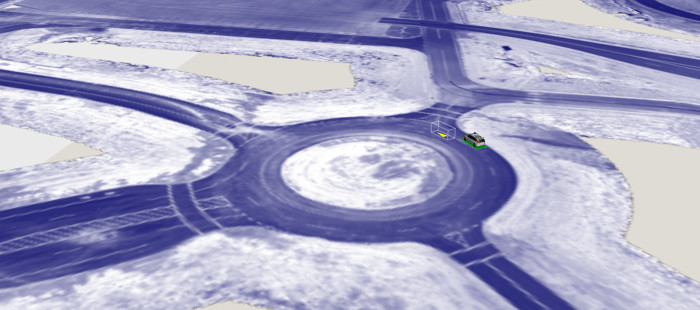
“Carcraft”该软件的创造者是一名头发蓬松、娃娃脸的年轻工程师——James Stout。此刻,他正戴着耳机坐在安静冷静僻静的开放式办公室里,盯着屏幕上虚拟出来的环形交叉路口。对于人类眼睛来说,能从屏幕上获取的信息并不久不多:也就是几条简单的线勾勒出了道路的结构和大配景。在这个虚拟的环形交叉路口,我们可以看到一辆中等分辨率的具备自动驾驶功能的克莱斯勒 Pacifica 车型,而一个简单的线框构成的立体盒子代表的则是别的一辆车。
几个月前,Waymo 的自动驾驶团队在得克萨斯州测试时便遭遇了这样一个环形交叉路口。当时车速很快,加之道路环境很复杂,一度让自动驾驶汽车陷入困惑,所以他们决定在测试场地构建一个模拟现实环境的道路模型。
而我(文章作者 Alexis C. Madrigal)现在看到的则是整个学习过程的第三步:真实环境驾驶的数字化、图像化呈现。在这一步,一个单一的驾驶行为(如在环岛的超车行为)可以被发散成上千种模拟场景,用来探测自动驾驶汽车能力的界限在哪里。
这样的场景构建为这家公司强大的模拟器打下了基础。“绝大多数已经完成的工作,都是受模拟场景中遇到问题的启发。”Stout 体现。这个工具也正是不停鞭策 Waymo 自动驾驶技术发展的强有力兵器。
如果 Waymo 能在几年后供应全自动驾驶汽车,那么 Carcraft 值得被永远铭记,作为现实世界的虚拟呈现,它功劳巨大。
以往,我们所采用的方法是“场景回放”,也就是将车辆在公共道路上行驶时经历的任何事件记录、存储下来,进行回放。而 Carcraft 则是模拟真实的场景,在自动驾驶研究中饰演着前所未有的重要角色。
在任何时间段,Waymo 的 25000 台虚拟的自动驾驶汽车,穿行在全模型版本的奥斯汀、山景城以及凤凰城等地,其自动驾驶车辆可能在一天之内在特别复杂的虚拟道路上跑成百上千遍。总体来说,他们现在每天在 Carcraft 虚拟世界的行驶里程可达 800 万英里。整个 2016 年,他们总共在虚拟世界中行驶了 25 亿英里,相较于他们在公共道路上测试的 300 万英里,超出了几个数量级。
并且,严格来说,在虚拟世界中进行的里程非常“有趣”,因为能设置一些纷歧样的道路状况,车辆可以从中学习到更多新的东西。而不像现实世界中千篇一律的高速公路行驶测试,车辆学不到太多的新东西。
当然,模拟只是 Waymo 诸多复杂工作中的一部分。这部分工作要通过他们在中央山谷(Central Valley)开展的奥秘的结构化测试计划与 Waymo 累积的数亿英里的公共道路测试里程进行紧密结合。Waymo 的奥秘基地被称为 Castle。
Waymo 此前从未公开过这个系统。他们在常规道路上进行的测试告诉他们,在哪些地方需要进行更为深入的探索和实践。他们将 Castle 基地需要的空间开辟出来,便可以在原地进行上千种差别道路场景的测试。同时,在真实世界测试的加持下,自动驾驶车辆可以收集到足够多的数据,在未来的任何时候都能创造出全电子化的模拟场景。在那样一个虚拟的空间之中,能够开脱真实世界的限制,在一个单一的场景下创造出上千种差别的情形,让数字化的车辆一一通过这些被创造出来的道路环境。


 咨 询 客 服
咨 询 客 服